5.2. 地理空間分析
![]()
Table Of Contents
廣布在生活環境中的微型測站,協助我們掌握細緻的環境變化,並可據以決策跟行動。所以,清楚地掌握測站間的分布和數據特性,也是我們在分析測站數據時的重要基礎。這些測站除了本身的位置可能會形成某種幾何結構或空間群聚。同時,我們也可以依照測站位置與數值的差異,去推估沒有測站的區域的數值,從而獲得一個更為全面的數值分佈狀況,並從中探索感測數值與環境因子間的相關性。在這一個段落中,我們會利用水利署在不同縣市的淹水感測器與地下水位站資料,來進行一些簡單的空間分析。
勢力分佈圖 (Voronoi diagram)
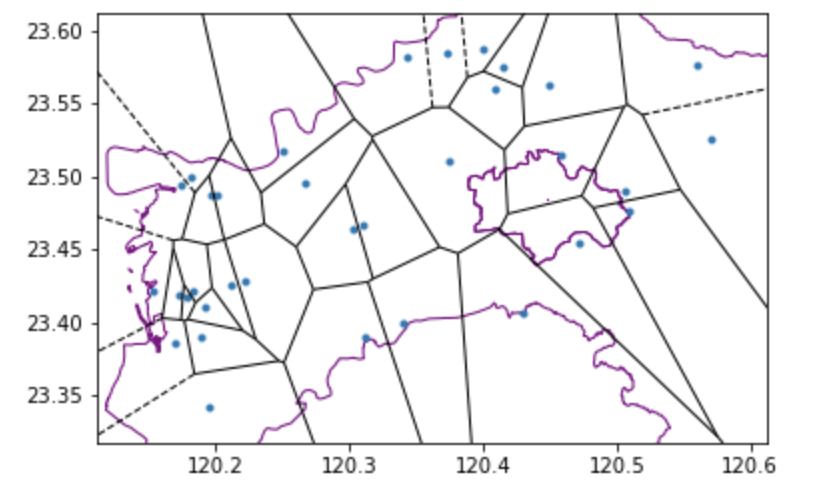
首先,我們可能需要釐清個別測站的服務/防守範圍,並以此範圍中的測站數據來代表該區的現況。這個時候,我們可以利用沃羅諾伊圖(voronoi diagram)的方法去找尋這個範圍。沃羅諾伊圖的原理是在兩個相鄰測站間建立一條垂直平分線段,並藉由整合這些線段以構成一個多邊形;每個多邊形範圍的中心點就是測站,而該測站的數值則約可代表這個範圍內的數值。在這個範例中,我們嘗試利用嘉義縣、嘉義市的淹水感測器資料,去練習建立沃羅諾伊圖,這樣我們就可以初略知道這些淹水感測器的勢力分佈範圍。
# 引入所需的模組
import matplotlib.pyplot as plt
import seaborn as sns
import pandas as pd
import numpy as np
import urllib.request
import ssl
import json
# 安裝 Geopython 相關函式模組
!apt install gdal-bin python-gdal python3-gdal
# 安裝 Geopandas 需要的 python3-rtree
!apt install python3-rtree
# 安裝 Geopandas
!pip install geopandas
# 安裝 Pykrige
!pip install pykrige
# 安裝 Elevation
!pip install elevation
# 安裝 Affine 和 Rasterio
!pip install affine rasterio
# 安裝 Geopandas 需要的 Descartes
!pip install descartes
# 引入 Geopandas
import geopandas as gpd
# 安裝和引入 pyCIOT
!pip install pyCIOT
import pyCIOT.data as CIoT
# 使用 wget 指令下載一個名為 "shp.zip" 的壓縮檔,檔案來源網址是內政部開放資料平台
!wget -O "shp.zip" -q "https://data.moi.gov.tw/MoiOD/System/DownloadFile.aspx?DATA=72874C55-884D-4CEA-B7D6-F60B0BE85AB0"
# 使用 unzip 指令解壓縮 "shp.zip",並將解壓縮的內容存到 "shp" 資料夾
!unzip shp.zip -d shp
# 以水利署淹水感測器資料為例,資料集 gpd 為感測器數值與位置資料、basemap為台灣縣市地理邊界 shp file
# 以pyCIOT取得資料
# 使用 CIoT 的 Water 模組,從 WRA 和 WRA2 來源收集水位資料
wa = CIoT.Water().get_data(src="FLOODING:WRA")
wa2 = CIoT.Water().get_data(src="FLOODING:WRA2")
flood_list = wa + wa2 # 合併兩個資料來源
# 讀取「嘉義縣」和「嘉義市」的地圖資料
county = gpd.read_file('/content/shp/COUNTY_MOI_1090820.shp')
basemap = county.loc[county['COUNTYNAME'].isin(["嘉義縣", "嘉義市"])]
# 創建一個 DataFrame 來儲存水位觀測站的資料
flood_df = pd.DataFrame([], columns=['name', 'Observations', 'lon', 'lat'])
# 迴圈歷遍每一個水位觀測站
for i in flood_list:
if len(i['data']) > 0: # 如果有資料
df = pd.DataFrame([[i['properties']['stationName'], i['data'][0]['values'][0]['value'], i['location']['longitude'], i['location']['latitude']]], columns=['name', 'Observations', 'lon', 'lat'])
else: # 若沒有資料,填入 -999
df = pd.DataFrame([[i['properties']['stationName'], -999, -999, -999]], columns=['name', 'Observations', 'lon', 'lat'])
flood_df = pd.concat([flood_df, df])
# 移除重複的觀測站並重新排序
result_df = flood_df.drop_duplicates(subset=['name'], keep='first')
station = result_df.sort_values(by=['lon', 'lat'])
station = station[station.lon != -999]
station.reset_index(inplace=True, drop=True)
# 轉換 DataFrame 為 GeoDataFrame
gdf_flood = gpd.GeoDataFrame(station, geometry=gpd.points_from_xy(station.lon, station.lat), crs="EPSG:4326")
# 設定地圖投影並取得交集資料
basemap = basemap.set_crs(4326, allow_override=True)
intersected_data = gpd.overlay(gdf_flood, basemap, how='intersection')
# 引入 scipy 的 Voronoi 和 voronoi_plot_2d 函式
from scipy.spatial import Voronoi, voronoi_plot_2d
# 創建一個 6x10 英寸的圖形和座標軸
fig, ax = plt.subplots(figsize=(6, 10))
# 提取交集資料的經緯度作為 Voronoi 圖的輸入點
inputp = intersected_data[['lon', 'lat']]
# 繪製基本地圖,面顏色為空,邊界顏色為紫色
basemap.plot(ax=ax, facecolor='none', edgecolor='purple')
# 建立 Voronoi 圖物件
vor = Voronoi(inputp)
# 繪製 Voronoi 圖,不顯示頂點
voronoi_plot_2d(vor, ax=ax, show_vertices=False)
# 顯示圖形
plt.show()
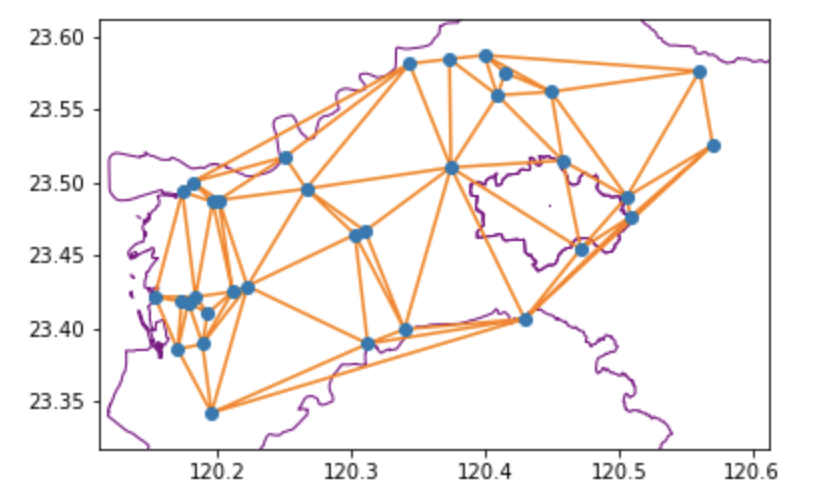
此外,我們也可以利用德勞內三角分割(Delaunay triangulation)去描述測站的服務/防守範圍;它的原理是以單一測站為中心,並尋找最鄰近的兩個點,以連接成一個三角形範圍。若我們將三角形的範圍視為一個均質的平面,而這個範圍內的感測數值則可用三個節點測站值的平均來替代。
整體而言,這兩個演算法都可以協助我們以圖形的方式,理解感測器在空間上的分佈,及其所建立的空間結構。
# 引入 scipy 的 Delaunay 和 delaunay_plot_2d 函式
from scipy.spatial import Delaunay, delaunay_plot_2d
import numpy as np # 引入 numpy 函式模組
# 創建一個 6x10 英寸的圖形和座標軸
fig, ax = plt.subplots(figsize=(6, 10))
# 把輸入點(經緯度)轉換成 numpy 陣列,因為 Delaunay 需要陣列格式的輸入
inputp = np.array(inputp)
# 建立 Delaunay 三角劃分物件
tri = Delaunay(inputp)
# 繪製基本地圖,面顏色為空,邊界顏色為紫色
basemap.plot(ax=ax, facecolor='none', edgecolor='purple')
# 繪製 Delaunay 三角劃分圖
delaunay_plot_2d(tri, ax=ax)
# 顯示圖形
plt.show()
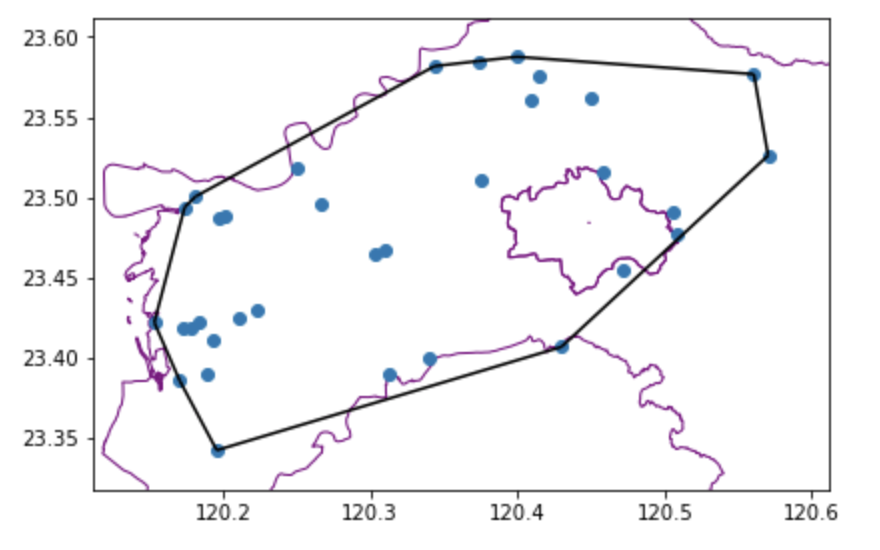
最小範圍多邊形/凸包 (Convex hull)
最小範圍多邊形的演算法,是從一群測站中,選出位於最邊緣的若干個測站構成一個能含納所有的點位、且邊長最小的多邊形,這樣我們就可以在一堆測站中,找到一個群聚的範圍,並用這個範圍來發展一些計算。最小範圍多邊形的演算法,主要是依照測站的x座標排序測站位置,而當 X 座標相同則以 Y 座標大小排序,從而找到最外圍的端點並連接成為多邊形 (當然類似的概念還有許多方法),透過最小範圍多邊形的演算,我們可以評估測站的有效監測範圍。所以,我們也可以利用嘉義縣、嘉義市的淹水感測器分佈,已瞭解這些淹水感測器的覆蓋範圍。
# 引入 scipy 的 ConvexHull 和 convex_hull_plot_2d 函式
from scipy.spatial import ConvexHull, convex_hull_plot_2d
# 創建一個 6x10 英寸的圖形和座標軸
fig, ax = plt.subplots(figsize=(6, 10))
# 使用 ConvexHull 函式來計算凸包
hull = ConvexHull(inputp)
# 繪製基本地圖,面顏色為空,邊界顏色為紫色
basemap.plot(ax=ax, facecolor='none', edgecolor='purple')
# 繪製凸包圖
convex_hull_plot_2d(hull, ax=ax)
# 調整布局以適應所有子圖元素
plt.tight_layout()
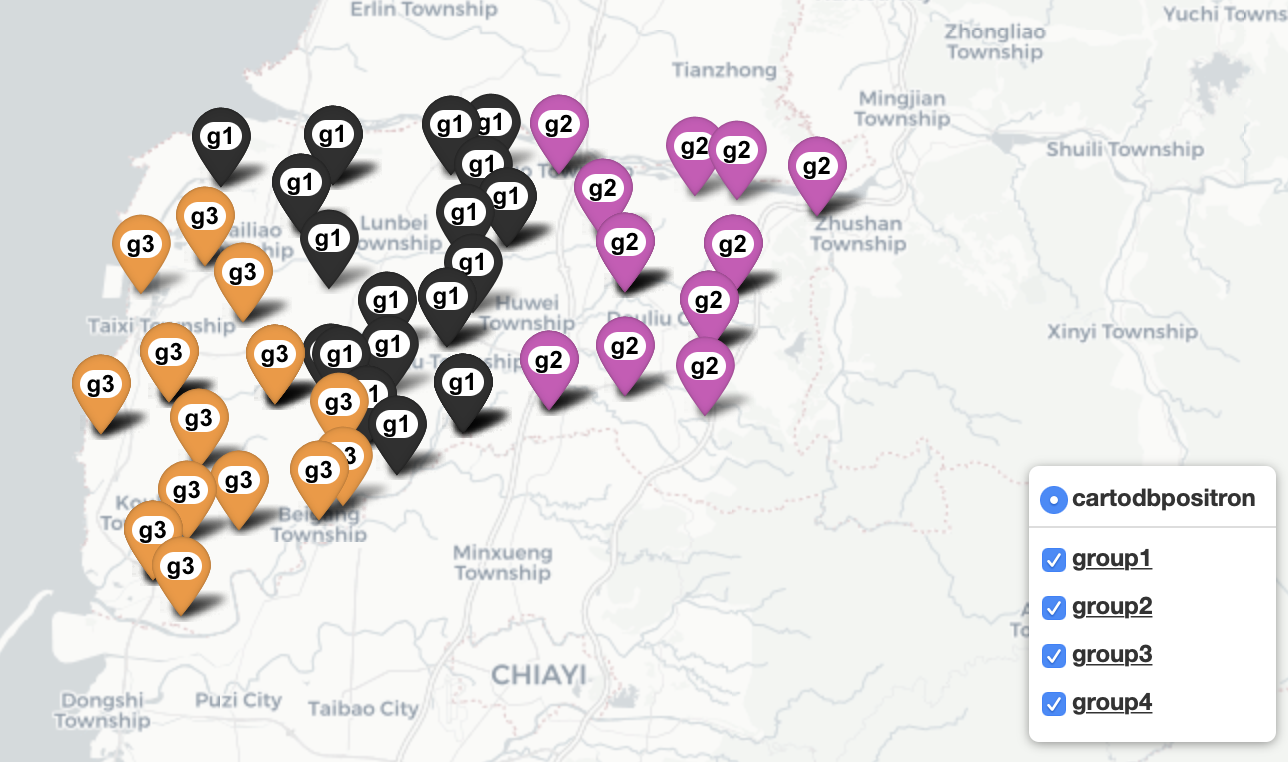
空間群聚 (Clustering)
正如前文所說,越鄰近的測站,其周邊環境中的干擾因子可能也越相似,所以我們可以利用 Kmeans 這種分類演算法,將測站進行分群,以進一步探勘其感測數據與環境因子間的關係。Kmeans主要是根據我們預先設定的分群的數量 n,並隨機尋找 n 個點做為中心,去尋找周邊的鄰居,經由量測樣本點與中心點的直線距離,去把樣本點分群並計算各群的平均值,最後,重複前述的程序直到所有樣本點與中心點的距離平均值最短,即可完成分群。
此外,測站不單只有空間位置,也會有其量測數值,如果我們同時參考其空間位置與量測數值,將量測數值較為相似且地理位置相近的測站聚集起來,這些聚集的測站所遭受的環境干擾因子亦較為接近,而透過測站的空間位置,亦正可以反映出不同環境干擾因子在地理空間上的影像範圍。因此,空間群聚也是地理空間資料分析的重要一環。在這個案例中,我們也嘗試以雲林地區的地下水位站為案例,去描述這些測站的空間群聚狀況。
# 獲取地下水位站資料
# 初始化計數器和 DataFrame
count = 733
num = 0
water_level = pd.DataFrame([])
# 使用 while 迴圈來處理多個 API 請求
while(num<=count):
# 拼接 API 網址
url_level = "https://sta.ci.taiwan.gov.tw/STA_WaterResource_v2/v1.0/Datastreams?$skip="+str(num)+"&$filter=%28%28Thing%2Fproperties%2Fauthority_type+eq+%27%E6%B0%B4%E5%88%A9%E7%BD%B2%27%29+and+substringof%28%27Datastream_Category_type%3D%E5%9C%B0%E4%B8%8B%E6%B0%B4%E4%BD%8D%E7%AB%99%27%2CDatastreams%2Fdescription%29%29&$expand=Thing,Thing%28%24expand%3DLocations%29,Observations%28%24top%3D1%3B%24orderby%3DphenomenonTime+desc%3B%24top%3D1%29&$count=true"
# 建立安全的 HTTPS 連線
ssl._create_default_https_context = ssl._create_unverified_context
# 發送 API 請求並接收回應
r_l = urllib.request.urlopen(url_level)
string_l = r_l.read().decode('utf-8')
# 載入JSON數據
jf_level = json.loads(string_l)
# 整理數據
station = pd.DataFrame(jf_level['value']).filter(items=['Thing','observedArea','Observations'])
station['lat']=station['observedArea']
for i in range(len(station)):
station['Thing'][i] = station['Thing'][i]['properties']['stationName']
# 處理經緯度和觀測數據
if pd.isnull(station['observedArea'][i]):
station['lat'][i]=-1
station['observedArea'][i]=-1
else:
station['lat'][i]=station['lat'][i]['coordinates'][1]
station['observedArea'][i]=station['observedArea'][i]['coordinates'][0]
if len(station['Observations'][i])!=0:
station['Observations'][i] = station['Observations'][i][0]['result']
else:
station['Observations'][i] = -1
# 重命名欄位
station = station.rename(columns={"Thing": "name", 'observedArea': 'lon'})
# 合併資料
if num ==0 :
water_level = station
else:
water_level = pd.concat([water_level, station])
# 更新計數器
num+=100
# 去除重複站點,並進行排序
result_df = water_level.drop_duplicates(subset=['name'], keep='first')
station=result_df.sort_values(by=['lon', 'lat'])
station.reset_index(inplace=True, drop=True)
# 過濾掉不合理的經緯度
station = station[station.lon!=-1]
# 轉換為地理資料框架
gdf_level = gpd.GeoDataFrame(
station, geometry=gpd.points_from_xy(station.lon, station.lat),crs="EPSG:4326")
# 與雲林縣範圍 intersect
# 選取「雲林縣」的底圖
basemap = county.loc[county['COUNTYNAME'].isin(["雲林縣"])]
# 設定底圖的坐標系統
basemap = basemap.set_crs(4326, allow_override=True)
# 將水位觀測站的地理數據與「雲林縣」的底圖進行交集運算
intersected_data = gpd.overlay(gdf_level, basemap, how='intersection')
# 引入 KMeans 分群演算法的函式模組
from sklearn.cluster import KMeans
# 引入 scipy 的 ConvexHull 函式模組,用於繪製凸包圖
from scipy.spatial import ConvexHull
# 引入 folium 函式模組,用於繪製地圖
import folium
# 從交集數據中選取需要的欄位:名稱、經度、緯度和觀測值
clusterp = intersected_data[["name", "lon", 'lat', 'Observations']]
# 1. 使用 KMeans 進行分群
# 1.1 資料前處理,只取經度和緯度作為特徵
X = clusterp.iloc[:, 1:3].values
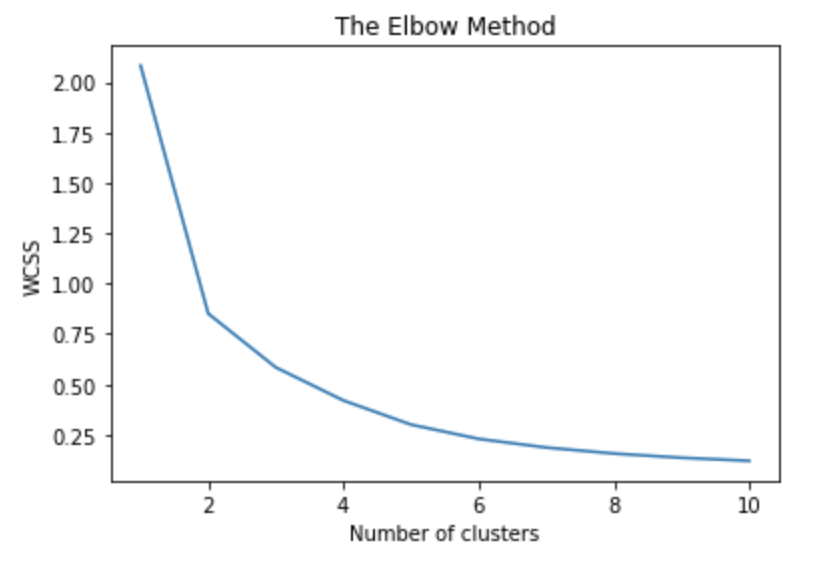
# 用 Elbow Method 來找出最佳的群數
wcss = [] # 存放每個 k 值對應的誤差平方和
for i in range(1, 11): # 試驗 1 到 10 的 k 值
kmeans = KMeans(n_clusters=i, init='k-means++', random_state=42)
kmeans.fit(X)
wcss.append(kmeans.inertia_) # 將誤差平方和加到列表中
# 畫出 Elbow Method 的圖,觀察轉折點以決定群數
plt.plot(range(1, 11), wcss)
plt.title('The Elbow Method')
plt.xlabel('Number of clusters')
plt.ylabel('WCSS')
plt.show()
# 1.2 使用 KMeans 演算法,根據選定的群數(這裡是 3)來訓練模型
kmeans = KMeans(n_clusters = 3, init = 'k-means++', random_state = 42)
# 進行模型訓練,並得到每個資料點的分群結果
y_kmeans = kmeans.fit_predict(X)
# 1.3 將分群結果存回原始 DataFrame
# 因為 K-Means 的群編號從 0 開始,所以這裡加 1,讓群編號從 1 開始
clusterp['cluster'] = y_kmeans + 1
# 2.將資料畫在地圖上
m = folium.Map(location=[clusterp['lat'].mean(), clusterp['lon'].mean()],
tiles='CartoDB positron',
zoom_start=7) # 創建底圖
# 為每個分群建立一個特殊的圖層
layer1 = folium.FeatureGroup(name= '<u><b>group1</b></u>',show= True)
m.add_child(layer1)
layer2 = folium.FeatureGroup(name= '<u><b>group2</b></u>',show= True)
m.add_child(layer2)
layer3 = folium.FeatureGroup(name= '<u><b>group3</b></u>',show= True)
m.add_child(layer3)
layer4 = folium.FeatureGroup(name= '<u><b>group4</b></u>',show= True)
m.add_child(layer4) # 加入圖層
# 自訂 CSS 樣式
m.get_root().html.add_child(folium.Element(my_symbol_css_class))
# 遍歷資料框並根據分群結果放置標記
for index, row in clusterp.iterrows(): # 遍歷每一行資料
# 決定要使用哪一個圖層和 icon
if row['cluster'] == 1:
color='black'
fa_symbol = 'fa-g1'
lay = layer1
elif row['cluster'] == 2:
color='purple'
fa_symbol = 'fa-g2'
lay = layer2
elif row['cluster'] == 3:
color='orange'
fa_symbol = 'fa-g3'
lay = layer3
elif row['cluster'] == 4:
color='blue'
fa_symbol = 'fa-g4'
lay = layer4
# 在地圖上創建標記
folium.Marker(
location=[row['lat'], row['lon']],
title=row['name']+ ' group:{}'.format(str(row["cluster"])),
popup=row['name']+ ' group:{},value:{}'.format(str(row["cluster"]),str(row['Observations'])),
icon=folium.Icon(color=color, icon=fa_symbol, prefix='fa')).add_to(lay) # 將標記添加到對應的圖層
# 準備將資料畫上地圖
layer_list = [layer1,layer2,layer3,layer4]
color_list = ['black','purple','orange','blue']
# 遍歷每一個獨立的群組
for g in clusterp['cluster'].unique():
# 利用 ConvexHull 找到每個群的邊界
latlon_cut =clusterp[clusterp['cluster']==g].iloc[:, 1:3] # 選取該群組的經緯度
hull = ConvexHull(latlon_cut.values) # 使用 ConvexHull 計算邊界
Lat = latlon_cut.values[hull.vertices,0]
Long = latlon_cut.values[hull.vertices,1] # 獲取邊界的經緯度
# 將經緯度資訊轉成 list,以在 folium 中使用
cluster = pd.DataFrame({'lat':Lat,'lon':Long })
area = list(zip(cluster['lat'],cluster['lon']))
# 畫出該群組的邊界
list_index = g-1
lay_cluster = layer_list[list_index]
folium.Polygon(locations=area,
color=color_list[list_index],
weight=2,
fill=True,
fill_opacity=0.1,
opacity=0.8).add_to(lay_cluster)
# 加入圖層控制器
folium.LayerControl(collapsed=False,position= 'bottomright').add_to(m)
# 輸出地圖並存為 HTML
print(m) # 顯示地圖
m.save('River_clustering.html') # 將地圖儲存為 HTML 檔案
密度 (Kernel density)
密度是我們常用以描述事件聚集強度的觀念,而傳統一般的密度都是以:個數/面積的公式去計算,但是,這樣的計算方法卻容易受到面積的影響,同樣的測站數/案例數在面積不同的鄉鎮,就會出現不同的密度,反而讓我們無法正確地探勘事件的聚集強度。
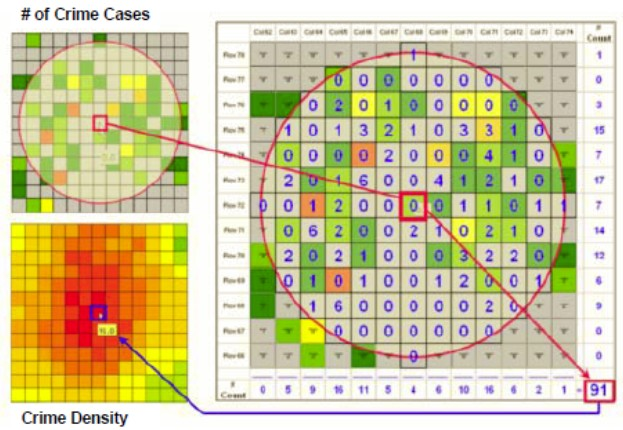
因此,為了避免面積造成計算的差異,所以我們可以用核密度 (kernel density) 的方式去描述事件聚集的強度;核密度的概念就是:以樣本點為中心,並利用固定半徑的移動視窗 (moving windows) 去框選其他樣本點,最後以所有樣本點的數值加總來取代樣本點的舊有數值。這樣的方式可以標準化密度公式中的「面積」,並取得一個全面性的密度分佈圖,以協助我們瞭解整體事件的分佈強度 (圖1)。
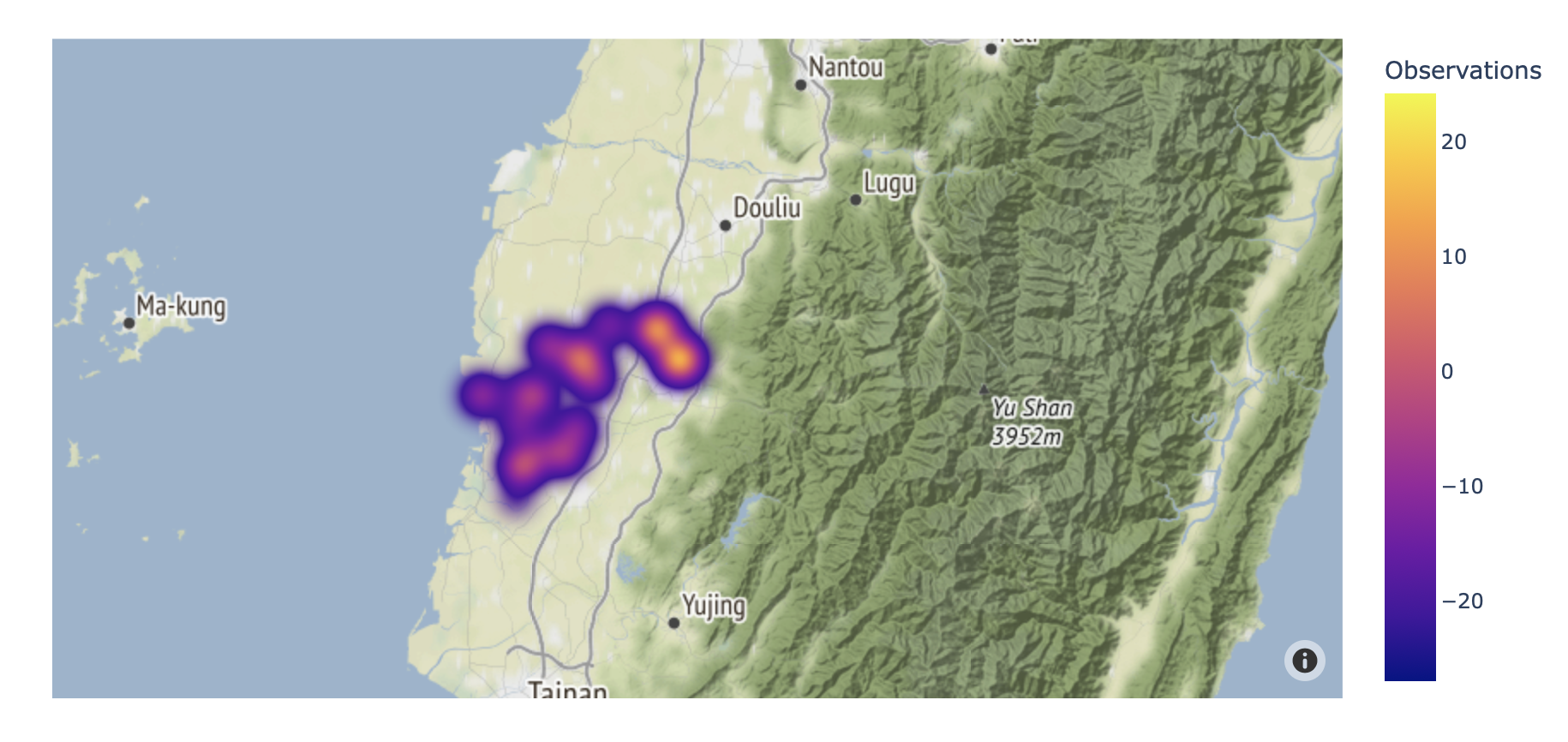
在這個案例中,我們也來看看是否能用核密度的方法去描述地下水位站的分佈強弱。
# 篩選出 "嘉義縣" 和 "嘉義市" 的地圖資料
basemap = county.loc[county['COUNTYNAME'].isin(["嘉義縣", "嘉義市"])]
# 將坐標系統設為 WGS 84 (EPSG:4326)
basemap = basemap.set_crs(4326, allow_override=True)
# 使用 'intersection' 方法來找出 gdf_level 和 basemap 的交集
gdf = gpd.overlay(gdf_level, basemap, how='intersection')
# 接下來,我們會選擇多邊形的幾何字段,
# 以過濾出那些未與基礎地圖重疊的點。
# 利用plotly套件 畫出河川水位核密度地圖,gdf為河川水位資料點位與數值
# 載入 plotly.express 套件,用於繪製核密度地圖
import plotly.express as px
# 使用 density_mapbox 函式來繪製核密度地圖
# 參數設定:
# - lat, lon, z 來自 gdf DataFrame,分別代表緯度、經度和觀測值
# - radius 是用來計算密度的半徑,設為 25
# - center 指定地圖中心點的緯度和經度
# - zoom 設為 8,是地圖的初始縮放等級
# - mapbox_style 是地圖的風格
fig = px.density_mapbox(gdf, lat='lat', lon='lon', z='Observations', radius=25,
center=dict(lat=23.5, lon=120.5), zoom=8,
mapbox_style="stamen-terrain")
# 顯示地圖
fig.show()
空間內插 (Spatial interpolation)
微型感測站的設置就像是我們在空間上進行數值採樣,透過這些採樣的結果,我們可以利用一些統計方法還原母體的全貌。因為我們無法在每一吋土地上佈滿測站,所以一定會面臨有些地區有資料,有些地區卻沒有資料的狀況,而空間內插 (Spatial interpolation) 就是以統計的方法,協助我們推估沒有資料的區域,進而了解母體全貌的方法。
要利用空間內插的方法,首先,我們必須要先瞭解:確定性模型(Deterministic model)與機率性模型 (Stochastic model) 這兩個概念。所謂確定性模型就是我們再掌握某空間現象的分佈規則下,舊可以利用某個相關性參數,去推估未知區域的數值,例如台灣的門牌號碼是將單數與雙數非別排列,所以假若某間房子的前一個門牌為6號,而後一個門牌為10號,那我們可以推估中間這個房子的門牌為8號。而機率性則是假設真實環境非常複雜,然而我們只能透過機率以及變異數的變化去建立適當的推估模型,並接受其差值以及不確定性 (uncertainty)。
所以,接下來我們就利用雲林的地下水位站來練習幾種常見的空間內插方法。
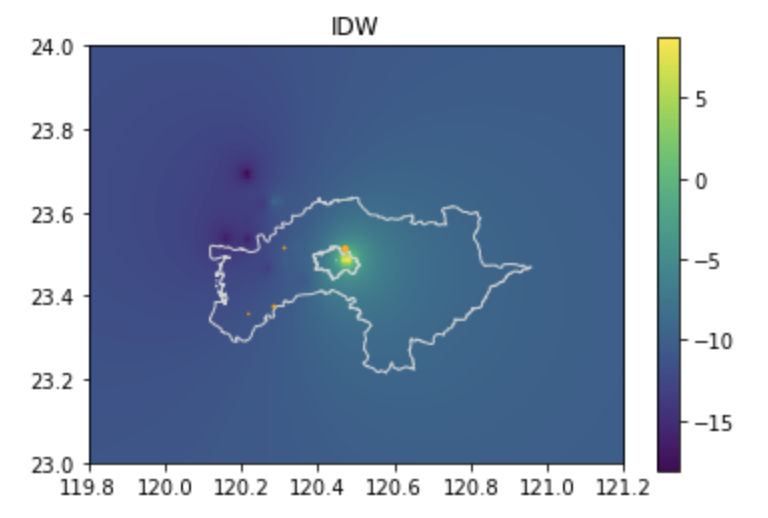
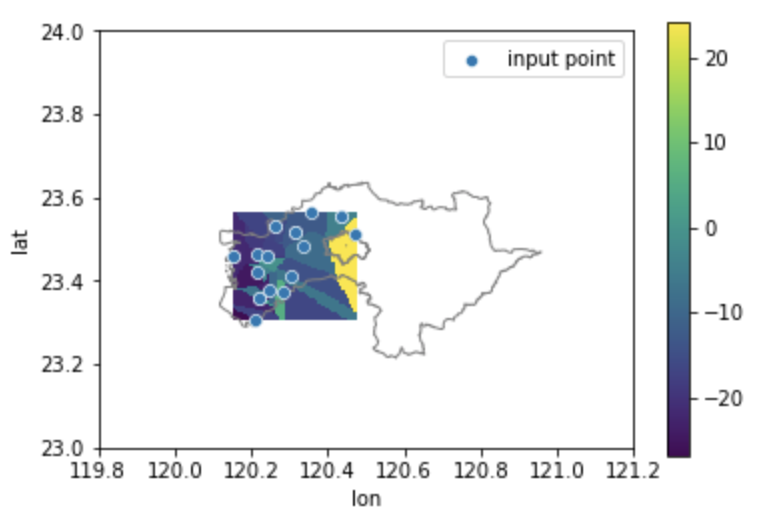
反距離加權法 (Inverse Distance Weighting)
在反距離加權法的模式中,我們會利用已知樣本點間的數值差與間距建立推估模型。一般而言,若兩點的差值為10單位、而間距為100公尺,則理論上每10公尺的差值應該為1,但是考量到差值的分佈不應該是線性關係,所以反距離加權法利用地理學第一定律:越鄰近的事物越相近,去以距離作為評估兩點之間數值差異的依據,其策略就是把差值X距離次方的倒數,以獲得該位置的推估值。所以,距離越大權數越小,反之距離越近,權數愈大。
# 引入 numpy 套件用於數值運算
import numpy as np
# 引入 matplotlib.pyplot 用於數據繪製
import matplotlib.pyplot as plt
# 引入 scipy.interpolate 的 Rbf 函式用於進行徑向基函式插值
from scipy.interpolate import Rbf
# 定義一個函式計算兩組點之間的距離矩陣
def distance_matrix(x0, y0, x1, y1):
# 垂直堆疊 x 和 y 坐標,並轉置
obs = np.vstack((x0, y0)).T
interp = np.vstack((x1, y1)).T
# 建立距離矩陣,根據 x 和 y 的差值
d0 = np.subtract.outer(obs[:,0], interp[:,0])
d1 = np.subtract.outer(obs[:,1], interp[:,1])
# 輸出矩陣的資料型別(用於除錯)
print(d0.dtype, d1.dtype)
# 計算歐式距離並返回
return np.hypot(d0, d1)
# 定義一個簡單的 IDW(Inverse Distance Weighting)函式
def simple_idw(x, y, z, xi, yi, pows):
# 計算距離矩陣
dist = distance_matrix(x, y, xi, yi)
# 計算 IDW 權重,即 1/距離
weights = 1.0 / dist
# 正規化權重,使其總和為 1
weights /= weights.sum(axis=0)
# 計算加權的 z 值
zi = np.dot(weights.T, z)
return zi
# 初始化繪圖環境,設定圖片大小與長寬比
fig, ax = plt.subplots(figsize=(6, 4))
ax.set_aspect('equal')
# 設定權重參數與網格數量
pows = 2
nx, ny = 100, 100
# 設定網格範圍
xmin, xmax = 119.8, 121.2
ymin, ymax = 23, 24
# 提取 gdf 中的經緯度和觀測數據
interpolatep = gdf[["lon", 'lat', 'Observations']]
x = interpolatep['lon'].astype("float64")
y = interpolatep['lat'].astype("float64")
z = interpolatep['Observations'].astype("float64")
# 產生插值點的網格
xi = np.linspace(xmin, xmax, nx)
yi = np.linspace(ymin, ymax, ny)
xi, yi = np.meshgrid(xi, yi)
xi, yi = xi.flatten(), yi.flatten()
# 使用 IDW 插值算法計算插值結果
grid = simple_idw(x, y, z, xi, yi, pows)
grid = grid.reshape((ny, nx))
# 繪製 IDW 插值結果
plt.imshow(grid, extent=(xmin, xmax, ymin, ymax))
# 繪製底圖與數據點
basemap.plot(ax=ax, facecolor='none', edgecolor='lightgray')
ax.scatter(x, y, marker=".", color='orange', s=z, label="input point")
# 顯示顏色條與座標軸範圍
plt.colorbar()
plt.xlim(xmin, xmax)
plt.ylim(ymin, ymax)
# 設定標題並顯示圖片
plt.title('IDW')
plt.show()
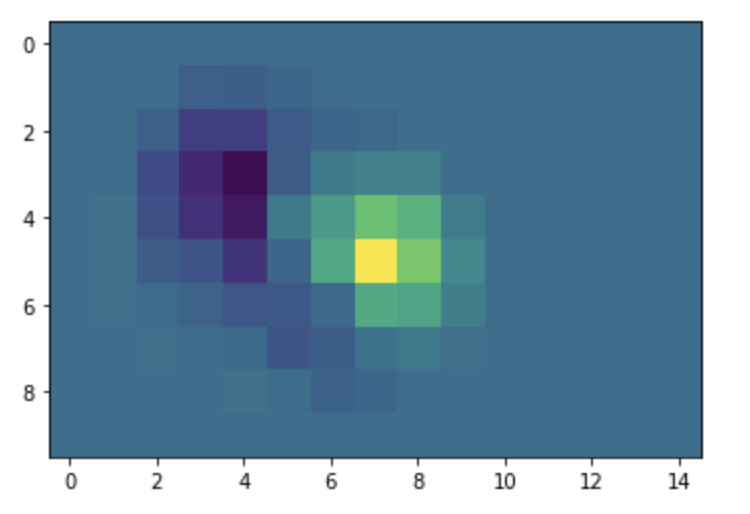
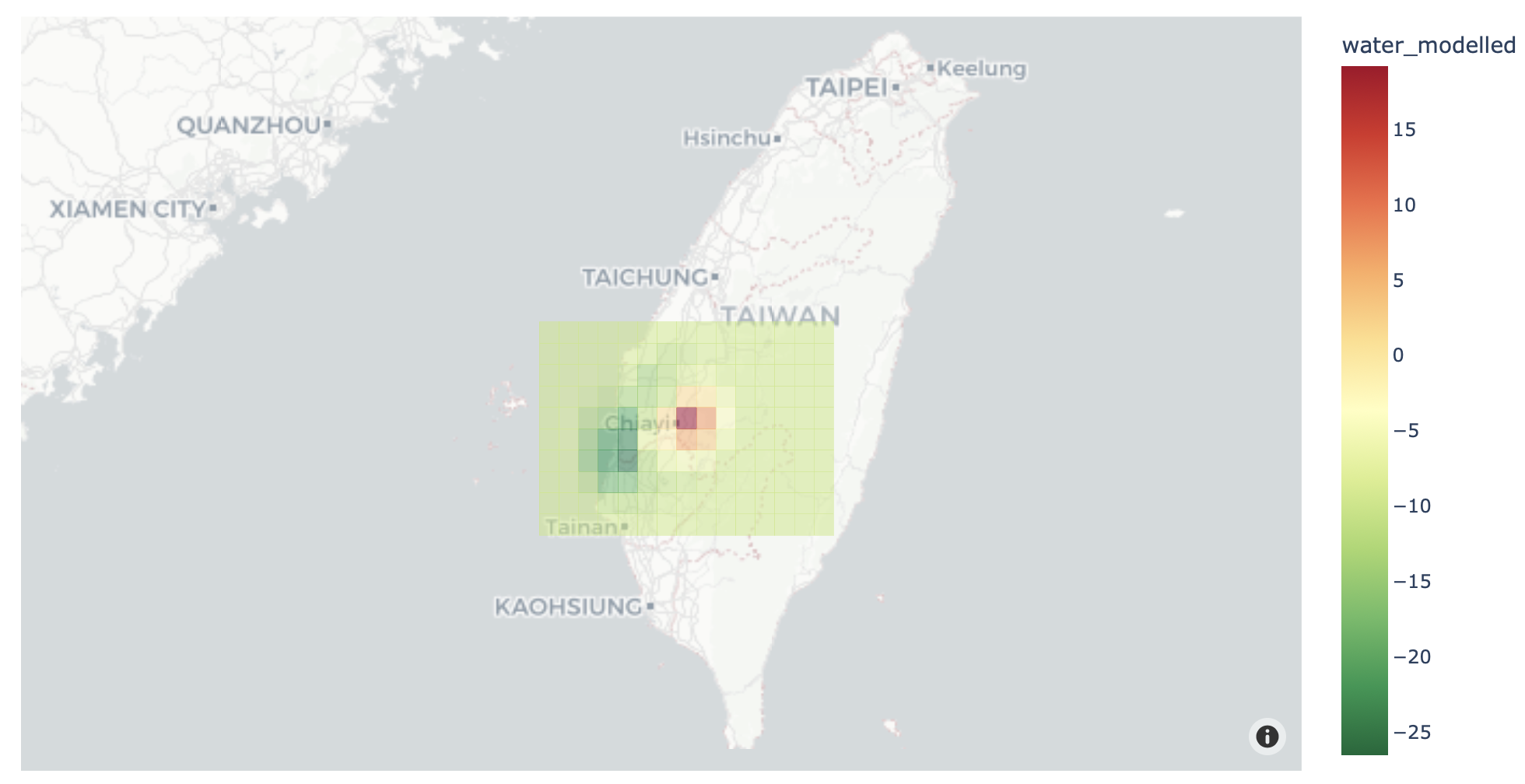
克力金法 (Kriging)
克利金法的原理則是利用已知點的位置與數值,去建立一個半變異圖 (semi-variogram),並依據這個圖進行樣本點的分組,以得到數個區域性變量 (regionalized variable),並以其為基礎進行數值推估。克利金法與前述反距離加權法相似,都是利用已知點的數值與距離去推估鄰近地區的未知點數值,比較大的差異是克力金法會將樣本的依照距離作分組,從而依照距離調整其不同的推估公式。
# 引入 NumPy 套件
import numpy as np
# 設定網格解析度,以公尺為單位
resolution = 0.1
# 根據解析度建立 x 和 y 的網格範圍
# x 軸範圍從 119.8 到 121.2
# y 軸範圍從 23 到 24
gridx = np.arange(119.8, 121.2, resolution)
gridy = np.arange(23, 24, resolution)
# 定義函式 raster to polygon
import itertools
from shapely.geometry import Polygon
# 定義 raster to polygon 函式
def pixel2poly(x, y, z, resolution):
"""
x: x座標的網格點
y: y座標的網格點
z: 每個 (x, y) 座標點對應的數值矩陣
resolution: 每個網格單元的空間解析度
"""
polygons = [] # 存放多邊形資訊
values = [] # 存放 z 值資訊
half_res = resolution / 2 # 網格單元一半的解析度
# 利用 itertools.product 遍歷每個網格點
for i, j in itertools.product(range(len(x)), range(len(y))):
# 計算多邊形邊界
minx, maxx = x[i] - half_res, x[i] + half_res
miny, maxy = y[j] - half_res, y[j] + half_res
# 創建多邊形並存入列表
polygons.append(Polygon([(minx, miny), (minx, maxy), (maxx, maxy), (maxx, miny)]))
# 根據 z 是否為單一數值或矩陣,來存入對應的 z 值
if isinstance(z, (int, float)):
values.append(z)
else:
values.append(z[j, i])
return polygons, values
# 引入 pykrige 套件中的 OrdinaryKriging 類別進行克里金內插
from pykrige.ok import OrdinaryKriging
# 初始化 OrdinaryKriging 類別,設定變異函式模型為 "spherical",並啟用偽逆矩陣計算
krig = OrdinaryKriging(x=gdf["lon"], y=gdf["lat"], z=gdf['Observations'], variogram_model="spherical", pseudo_inv=True)
# 執行克里金內插,對 gridx 和 gridy 進行計算,返回數值 z 和半方差 ss
z, ss = krig.execute("grid", gridx, gridy)
# 使用 matplotlib 繪製內插後的數值 z
plt.imshow(z);
# 利用plotly 將網格與地圖疊合呈現
# 引入 plotly.express 進行視覺化
import plotly.express as px
# 使用先前定義的 pixel2poly 函式將網格轉換為多邊形和相應的數值
polygons, values = pixel2poly(gridx, gridy, z, resolution)
# 將多邊形和數值組合成 GeoDataFrame,並設定座標系統
water_model = (gpd.GeoDataFrame({"water_modelled": values}, geometry=polygons, crs="EPSG:4326")
.to_crs("EPSG:4326")
)
# 利用 plotly 建立地圖,並將多邊形與地圖疊合
fig = px.choropleth_mapbox(water_model, geojson=water_model.geometry, locations=water_model.index,
color="water_modelled", color_continuous_scale="RdYlGn_r", opacity=0.5,
center={"lat": 24, "lon": 121}, zoom=6,
mapbox_style="carto-positron")
# 更新 layout 和 trace 設定
fig.update_layout(margin=dict(l=0, r=0, t=30, b=10))
fig.update_traces(marker_line_width=0)
最近鄰居插值 (Nearest neighbor Interpolation)
最近鄰居法的方法其實很簡單,若我們想得知空間上某一個位置的數值,只需要找到最鄰近且有數值的測站,就可以當作是這個位置的數值。這個方法基本上也是依循越鄰近越相似的原理去設計,且常被應用在影像處理及放大的案例上。
# 引入所需的套件
from scipy.interpolate import NearestNDInterpolator
import matplotlib.pyplot as plt
# 初始化 matplotlib 的 figure 和 axis
fig, ax = plt.subplots(figsize=(6, 4))
# 從 GeoDataFrame 中提取需要的經緯度和觀察數據
interpolatep = gdf[["lon", 'lat', 'Observations']]
xd = interpolatep['lon']
yd = interpolatep['lat']
zd = interpolatep['Observations']
xd = xd.astype("float64")
yd = yd.astype("float64")
zd = zd.astype("float64")
# 建立網格範圍
X = np.linspace(min(xd), max(xd))
Y = np.linspace(min(yd), max(yd))
X, Y = np.meshgrid(X, Y) # 轉為 2D 網格
# 使用 NearestNDInterpolator 方法進行內插
interp = NearestNDInterpolator(list(zip(xd, yd)), zd)
Z = interp(X, Y)
# 繪製內插後的數據
im = ax.pcolormesh(X, Y, Z, shading='auto')
# 繪製基本地圖
basemap.plot(ax=ax, facecolor='none', edgecolor='gray')
# 繪製原始的數據點
sns.scatterplot(x='lon', y='lat', data=interpolatep, label="input point")
# 加入圖例和顏色條
plt.legend()
plt.colorbar(im)
# 設定 x 和 y 軸的範圍
plt.xlim(xmin, xmax)
plt.ylim(ymin, ymax)
# 顯示圖形
plt.show()
空間內插後的資料處理
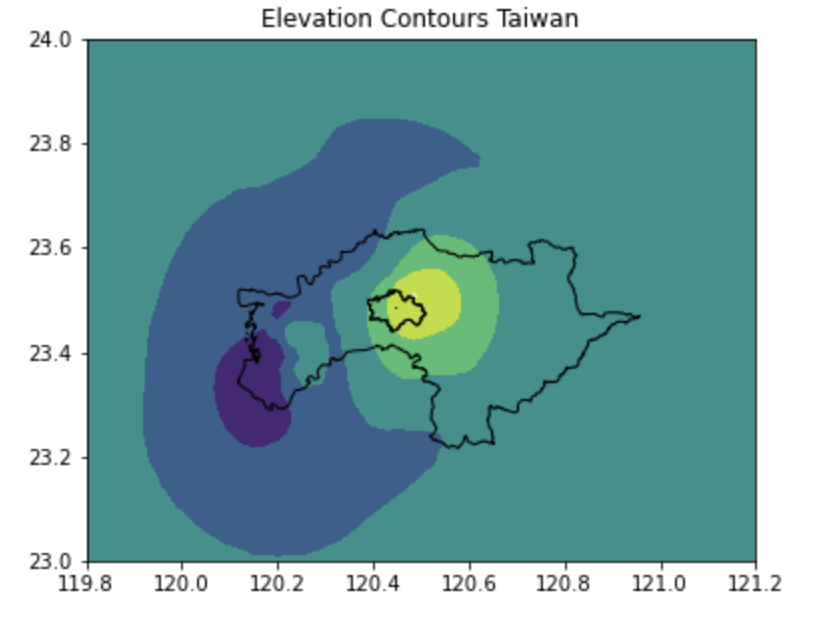
擷取等值線資料 (contour)
一般來說,我們將測站依照其位置與數值進行空間內插後,就會得到一個全面性的網格資料,然而,我們可以如何解析這些網格資料呢?首先,最容易的方式就是依照網格的數值與位置,去將數值相近的點連成一條線,其概念類似於在起伏不定的地形上,劃設等高線,而我們這樣的話法可以將其視為等值線。
# 引入 GDAL 模組,用於地理空間數據操作
from osgeo import gdal
# 引入 NumPy 模組,用於數組運算
import numpy as np
# 引入 Matplotlib 模組,用於繪圖
import matplotlib
# 引入 pyplot,用於 2D 圖形繪製
import matplotlib.pyplot as plt
# 引入 elevation 模組,用於處理高程數據
import elevation
# 初始化 Matplotlib 的 figure 和 axis
fig, ax = plt.subplots(figsize=(6, 10))
# 定義網格範圍
X = np.linspace(xmin, xmax)
Y = np.linspace(ymin, ymax)
# 使用 OrdinaryKriging 進行克里金內插
krig = OrdinaryKriging(x=interpolatep['lon'], y=interpolatep['lat'], z=interpolatep['Observations'], variogram_model="spherical")
z, ss = krig.execute("grid", X, Y)
# 利用 contourf 繪製等高線圖
im = ax.contourf(z, cmap="viridis", levels=list(range(-30, 30, 10)), extent=(xmin, xmax, ymin, ymax))
# 繪製基本地圖
basemap.plot(ax=ax, facecolor='none', edgecolor='black')
# 加入標題
plt.title("Elevation Contours Taiwan")
# 顯示圖形
plt.show()
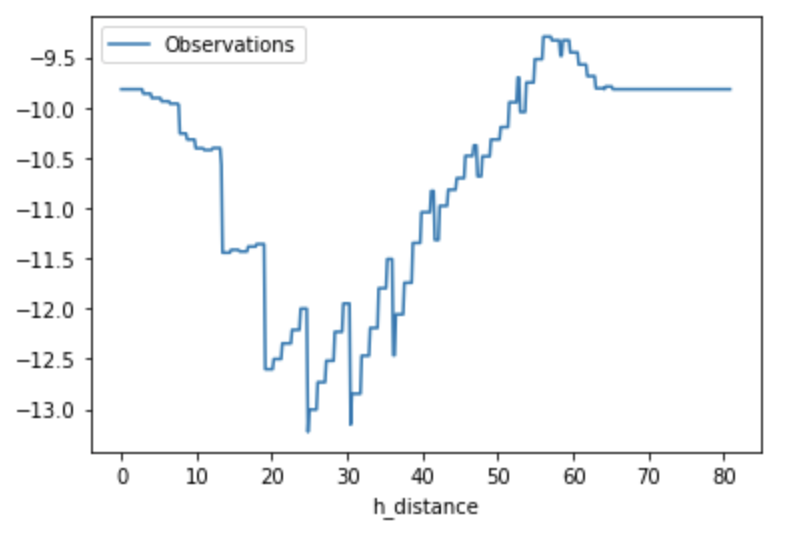
擷取橫切面的資料 (Profile)
劃設等值線可以讓我們獲知數值的分佈梯度與範圍,而另一個協助我們瞭解數值分佈的方式則是剖面線,其原理就是在兩點之間劃設一條直線,並依照直線的位置去擷取相對應的推估數值。這樣的方法可以協助我們知道兩點之間的數值變化起伏,在某些空氣品質的研究中,科學家就會利用剖面線的方式評估道路兩側的PM2.5變化。
# 引入 Affine 和 rasterio 模組,用於處理地理轉換和寫入 GeoTIFF 檔
from affine import Affine
import rasterio
# 定義將內核密度估計輸出為 raster 格式的函式
def export_kde_raster(Z, XX, YY, min_x, max_x, min_y, max_y, proj, filename):
'''Export and save a kernel density raster.'''
# 計算 X 和 Y 的解析度
xres = (max_x - min_x) / len(XX)
yres = (max_y - min_y) / len(YY)
# 創建轉換矩陣,用於定義地理空間的定位
transform = Affine.translation(min_x - xres / 2, min_y - yres / 2) * Affine.scale(xres, yres)
# 使用 rasterio 模組開啟一個新的 GeoTIFF 檔案來儲存輸出
with rasterio.open(
filename,
mode="w",
driver="GTiff",
height=Z.shape[0],
width=Z.shape[1],
count=1,
dtype=Z.dtype,
crs=proj,
transform=transform,
) as new_dataset:
# 將計算好的內核密度估計寫入新的 GeoTIFF 檔案
new_dataset.write(Z, 1)
# 引入 Kriging 插值需要的 pykrige 模組
from pykrige.ok import OrdinaryKriging
# 引入 affine 模組,用於處理坐標轉換
from affine import Affine
# 引入 rasterio 模組,用於讀寫 raster 格式的地理資料
import rasterio
# 引入 math 模組,用於數學運算,如平方根等
import math
# 引入 pandas 模組,用於數據分析
import pandas as pd
# 引入 geopandas 模組,用於處理地理空間資料
import geopandas as gpd
# 引入 numpy 模組,用於數值計算
import numpy as np
# 設定起點和終點的座標,以及網格解析度
start_cor = [119.9, 23.2]
end_cor = [120.1, 23.9]
npoints = 100
X = np.linspace(xmin, xmax, npoints)
Y = np.linspace(ymin, ymax, npoints)
# 從 GeoDataFrame 中取出觀測資料
interpolatep = gdf[["lon", 'lat', 'Observations']]
xd = interpolatep['lon'].astype("float64")
yd = interpolatep['lat'].astype("float64")
zd = interpolatep['Observations'].astype("float64")
# 執行 Ordinary Kriging 插值
krig = OrdinaryKriging(x=xd, y=yd, z=zd, variogram_model="spherical")
zr, ss = krig.execute("grid", X, Y)
# 使用之前定義的函式輸出 Kriging 插值結果為 raster 格式
export_kde_raster(Z=zr, XX=X, YY=Y,
min_x=xmin, max_x=xmax, min_y=ymin, max_y=ymax,
proj=4326, filename="kriging_result.tif")
# 開啟輸出的 Kriging raster
kriging = rasterio.open("kriging_result.tif", mode='r')
# 計算起點和終點之間的距離
dist = math.sqrt((end_cor[0] - start_cor[0]) ** 2 + (end_cor[1] - start_cor[1]) ** 2) * 111
# 建立線性內插的網格點
npoints = 500
lat = np.linspace(start_cor[1], end_cor[1], npoints)
lon = np.linspace(start_cor[0], end_cor[0], npoints)
distarray = np.linspace(0, dist, npoints)
# 創建 DataFrame 來儲存資料
df = pd.DataFrame({'Latitude': lat, 'Longtitude': lon, 'h_distance': distarray})
df['Observations'] = 0
gdf_pcs = gpd.GeoDataFrame(df, geometry=gpd.points_from_xy(df.Longtitude, df.Latitude))
gdf_pcs.crs = {'init': 'epsg:4326'}
# 從 Kriging raster 中讀取對應點的數值
for index, row in gdf_pcs.iterrows():
rows, cols = kriging.index(row['geometry'].x, row['geometry'].y)
kri_data = kriging.read(1)
df['Observations'].loc[index] = kri_data[rows, cols]
# 繪製水平距離和觀測數值的關係圖
profile = df[['h_distance', 'Observations']]
profile.plot(x='h_distance', y='Observations')
# 關閉 raster 檔
kriging.close()
參考資源
- Geopandas初探, Chimin. https://ithelp.ithome.com.tw/articles/10202336
- scipy.spatial 空間處理模組說明 (https://docs.scipy.org/doc/scipy/reference/spatial.html)
- scipy.interpolate 空間內插模組說明 (https://docs.scipy.org/doc/scipy/reference/interpolate.html)
- pykrige 克力金內插模組說明 (https://geostat-framework.readthedocs.io/projects/pykrige/en/stable/api.html#krigging-algorithms)
